

|
|
|
|
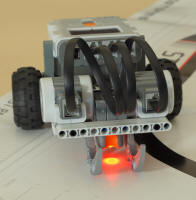
| When prompted to sample the "Min" or "Black" reading, position the sensor so that the red spot is centered over the line and then press the Enter button on the NXT. | When prompted to sample the "Max" or "White" reading, position the sensor so that the red spot is completely over the surface away from the line and press the Enter button on the NXT. | When line following, the robot will try to align itself centered over the boundary between white and black (not centered over the black line), with black to the robot's left. Here the brightness seen by the sensor is halfway between the black/min and white/max readings. |
Courtesy of Lego Education